TL;DR: After showing the data capture efficiency of 360° cameras, we address a key challenge in casual 360° capture: the always-visible camera operator.
Abstract
Radiance fields have emerged as powerful tools for 3D scene reconstruction.
However, casual capture remains challenging due to the narrow field of view of perspective cameras, which limits viewpoint coverage and feature
correspondences necessary for reliable camera calibration and reconstruction.
While commercially available 360° cameras offer significantly broader coverage than perspective cameras for the same capture effort,
existing 360° reconstruction methods require special capture protocols and pre-processing steps that undermine the promise of radiance fields:
effortless workflows to capture and reconstruct 3D scenes.
We propose a practical pipeline for reconstructing 3D scenes directly from raw 360° camera captures.
Our pipeline requires no special capture protocols or pre-processing, and exhibits robustness to a prevalent source of reconstruction errors:
the human operator that is visible in all 360° imagery.
To facilitate evaluation, we introduce a multi-tiered dataset of scenes captured as raw dual-fisheye images, establishing a benchmark for robust
casual 360° reconstruction.
Our method significantly outperforms not only vanilla 3DGS for 360° cameras but also robust perspective baselines when perspective cameras are
simulated from the same capture, demonstrating the advantages of 360° capture for casual reconstruction.
Can casual capture make 3D dataset creation scalable?
A common approach for 3D-reconstructible scene capture is to record a short handheld iPhone video, split it into frames, and feed them to a reconstruction
model. This is appealing because it works casually, without special instructions or careful setup during capture, making it easy to scale to many
scenes. The catch is that a phone camera has a limited field of view. What feels like a full sweep of the scene often still leaves large parts unseen,
which can lead to holes and artifacts in the final reconstruction.
Pinhole camera
(-)
But why not just use a 360° camera?
A natural idea, then, is to increase the field of view to 360°, and use commercially available dual-fisheye cameras along with methods like 3DGRT for 360°
reconstruction. But how much does that actually help in a controlled setting?
We benchmark the effect of replacing a perspective camera with a 360° camera under the same fixed training and test trajectories.
The benefits appear at two levels: better camera calibration and better reconstruction.
360° for calibration
(-)
We first use the 360° images for camera calibration in COLMAP, then undistort them into perspective images for reconstruction. We use reconstruction quality
here as a proxy for better camera calibration. The result still has holes, because reconstruction is performed from undistorted perspective images, but notice
how the floater artifacts in the middle of the scene disappear thanks to the improved camera calibration.
We then use 360° imagery for both calibration and reconstruction by training directly on the raw dual-fisheye images. This preserves the calibration benefits
while also keeping the full scene coverage, and you can see how the added coverage removes the holes in the reconstruction much more effectively.
360° for calibration + reconstruction
(-)
Below is a comparison of all three setups side by side, and the fixed controlled train trajectory (purple) and test
trajectory (yellow) shared across them:
-
-
-
Camera path
Notice how the reconstruction from 360° imagery is the most robust to out-of-distribution test views that lie far from the capture trajectory.
Stitched omnidirectional image
So let's use 360° images, but how?
A common option is to stitch the two fisheye views into a single omnidirectional image and use that for training.
However, stitching introduces visible artifacts, and using stitched images as supervision can degrade reconstruction quality.
This is why we instead work directly with the raw dual-fisheye frames.
The challenge is you, the capturer!
A 360° camera captures the full scene, but it also captures the camera operator in every frame. The operator shifts, moves their hand around, and changes during the capture.
As a result, if we naively train on raw dual-fisheye captures, the operator can appear as artifacts in the final rendering, degrading the quality.
Reconstructed operator
Reconstructed operator in SLS
Unlike ordinary transient effects that can often be filtered out by robust reconstruction methods that track rendering error residuals,
the operator is usually not transient enough
to be detected by these methods reliably: during capture, people often remain still for long periods while only moving their arms or the camera slightly.
We show that SpotLessSplats (SLS) struggles in one such scene.
How do we remove the operator from 360° captures reliably?
We design a pipeline that utilizes general-purpose vision foundation models to reliably segment the camera operator in highly distorted 360° dual-fisheye
images, without extra training, fine-tuning, or manual prompts.
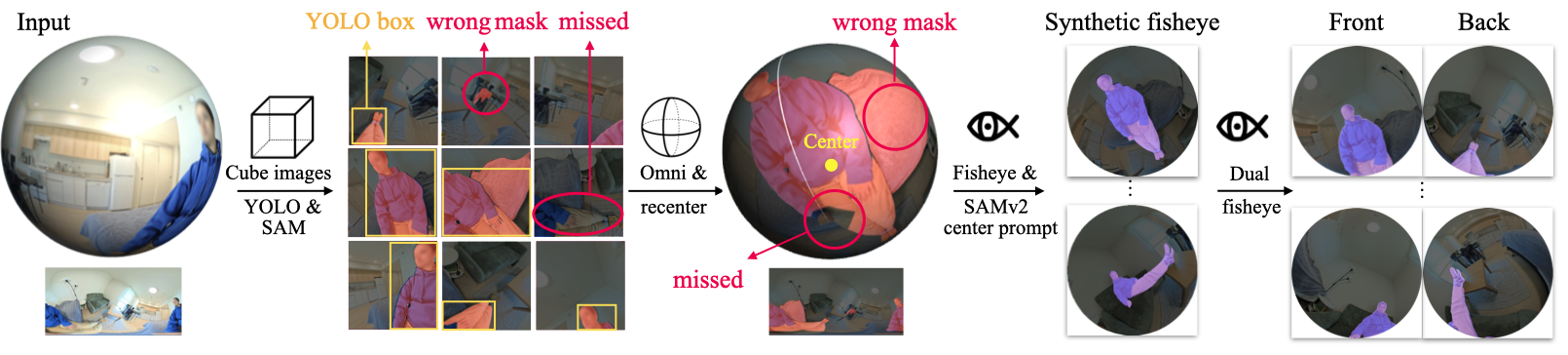
We first run YOLOv8 and SAMv2 on overlapping image patches to get a coarse estimate of the operator's location. While the masks are often incomplete due to
distortion and partial crops, they provide a reliable estimate of the operator's center.
We then re-center the omnidirectional image on this estimated center and render synthetic fisheye views from the re-centered 360° image.
Next, we run SAMv2 again, this time using only the center point as a positive prompt. This produces a much more complete mask of the operator in the
re-centered fisheye frames.
Finally, we map these masks back to the original dual-fisheye inputs.
Our masking pipeline
What about omnidirectional segmentation?
An alternative masking strategy is to use a fine-tuned SAM-based model for omnidirectional images, such as OmniSAM, and prompt it with a "person" text label.
However, these methods are often less robust in highly distorted regions, which can leave residual operator pixels that later appear as reconstruction
artifacts.
OmniSAM failure in operator segmentation
Our masking result
In contrast, our method masks the operator reliably even in heavily distorted regions, producing much cleaner masks and preventing these residual pixels
from appearing as artifacts in the final reconstruction.
Results
Our method produces clean, high-fidelity reconstructions without visible distractor artifacts, outperforming baseline methods.
Below, we show comparisons with SLS as a robust 3DGS reconstruction method on both perspective images and dual-fisheye frames, as well as vanilla 3DGRT.
@article{foroutan2026fullcircle,
title = {FullCircle: Effortless 3D Reconstruction from Casual 360° Captures},
author = {Foroutan, Yalda and Oztas, Ipek and Rebain, Daniel and Dundar, Aysegul and Yi, Kwang Moo and Goli, Lily and Tagliasacchi, Andrea},
journal = {arXiv preprint arXiv:2603.22572},
year = {2026}
}
 Data
Data